Thursday, October 20, 2011
Quadcopter-Change of Plans
Yesterday, I went to Charlotte Hackerspace, which was doing a workshop-type thing on building quadcopters. I talked to the guy in charge of it, and he told me a bunch of helpful things, and I saw things that have influenced the way I'll build the quad. The first thing that changed was the code I'm using. I'll now use the beta code and configurator instead of the 2.7.1 code and configurator. Also, I found out what the configurator does. It programs the escs and calibrates the transmitter. Simply put, it does the hard stuff that I was worried about. I found out how I'm going to build my frame and mount my motors. I'm going to build a wooden frame, and attach the motors in a way I'll describe some other time. He also told me to use a different type of wire. The kind you can't find at radio shack. This is the kind of wire used on the battery, escs, and motors. It's silicon-covered, and has a more rubbery feel than normal wire. It's also more flexible and better for soldering because it doesn't shrink or anything. He gave me a cool piece of metal with copper on both sides separated by silicon. That way, I can send the positive current through the top and the negative through the bottom for simplicity instead of splitting a wire in a complex way. He told me I only needed three of these, which I was amazed by. I thought I needed six, and I would have if I didn't know what certain slots in the receiver were for. I'll go over that in the documentation. I'm also going to get shrink wrap to make connecting the motors and escs better. I was pretty stupid not to think of that before. I don't have a heat gun, but I think you can use a lighter. That's all. I hope to have the quad done in less than two weeks. Honestly, it's a weekend's worth of work if you know what you're doing, but I procrastinate, and now it's been about six months. That's all I have to say right now. Expect another documentation on Monday or something.
Sunday, October 16, 2011
Quadcopter Documentation/Tutorial 4: Charging the Battery
I've realized that since there are so many tutorials out there, I'm doing a documentation of my experience rather than trying to help others, which this can still be used for, by the way. That's why I'm calling it a documentation/tutorial because the primary purpose is to record my experience while a secondary purpose is to help beginners such as me.
Today I soldered some bullet connectors (which I need to get more of and charged my battery for the first time. I'll explain everything in the order I did them:
The first thing I did was cut the lengths of wire I needed. I used a wire cutter/stripper, but I think there are other options (although I'm not sure trying to cut with scissors would be a good idea. Since I was only going to use these lengths for charging, I cut them relatively short.
 I cut two of these. If I were professional, I would have cut one red wire and one black wire for positive and negative, but I only have this roll of 16 gauge wire and I don't feel like going out and buying more. I then stripped each end with the same tool. If you don't have a wire stripper, use a knife. You can cut the end off, but it's usually not as neat.
I cut two of these. If I were professional, I would have cut one red wire and one black wire for positive and negative, but I only have this roll of 16 gauge wire and I don't feel like going out and buying more. I then stripped each end with the same tool. If you don't have a wire stripper, use a knife. You can cut the end off, but it's usually not as neat.

 At first, I stripped too much off. There was still wire showing after placing the ends in the bullet connectors. The ends should end up looking more like this (about half as long:
At first, I stripped too much off. There was still wire showing after placing the ends in the bullet connectors. The ends should end up looking more like this (about half as long:
 After cutting and stripping the wires, I went outside and got my solder and soldering iron ready. I used the 30 watt setting of my soldering iron and I used .062" diameter solder.
After cutting and stripping the wires, I went outside and got my solder and soldering iron ready. I used the 30 watt setting of my soldering iron and I used .062" diameter solder.
 The first thing I did was cover one of the ends of one of the wires in solder. That way, It fills up empty space in the bullet connector.
The first thing I did was cover one of the ends of one of the wires in solder. That way, It fills up empty space in the bullet connector.
 I then put the bullet connector pointing up on an alligator clamp. It's important to have something like this because it gets hot and is hard to hold in this position otherwise. I filled it mostly with solder, then I put the soldered end of the wire into it. If it dries before you can put the wire in, heat it up with the soldering iron as you place it in. Solder melts easily, but dries fast.
I then put the bullet connector pointing up on an alligator clamp. It's important to have something like this because it gets hot and is hard to hold in this position otherwise. I filled it mostly with solder, then I put the soldered end of the wire into it. If it dries before you can put the wire in, heat it up with the soldering iron as you place it in. Solder melts easily, but dries fast.

 I did this with both bullet connectors: one on each wire. I couldn't get the red protector on right, but know how now, but too late. I'll demonstrate when my new ones come in. Instead, I put electrical tape around the sections that would be exposed. It works, but isn't as elegant.
I did this with both bullet connectors: one on each wire. I couldn't get the red protector on right, but know how now, but too late. I'll demonstrate when my new ones come in. Instead, I put electrical tape around the sections that would be exposed. It works, but isn't as elegant.
 Plugged into the battery, they look like this:
Plugged into the battery, they look like this:

 I started by using the alligator clips. I clipped them to the exposed ends of each one of the soldered wires. Make sure the red alligator clip is on the male bullet connector and the black one is on the female one. Also make sure they're plugged into the right slots in the charger.
I started by using the alligator clips. I clipped them to the exposed ends of each one of the soldered wires. Make sure the red alligator clip is on the male bullet connector and the black one is on the female one. Also make sure they're plugged into the right slots in the charger.
 Afterwards, I plugged the bullet connectors into the battery and plugged the battery's balance plug into the charger.
Afterwards, I plugged the bullet connectors into the battery and plugged the battery's balance plug into the charger.
 I actually did the next step first because I wasn't thinking properly. All it is is plugging the charger into the wall. It doesn't make much difference when you plug it in, but it's a tiny bit safer if you wait.
I actually did the next step first because I wasn't thinking properly. All it is is plugging the charger into the wall. It doesn't make much difference when you plug it in, but it's a tiny bit safer if you wait.
 I then had to go through the charger's menu to charge my battery properly. First, I had to choose LiPo battery, so I just pressed "Type" and cycled through with the left and right arrows until I found it. Then I pressed "Start".
I then had to go through the charger's menu to charge my battery properly. First, I had to choose LiPo battery, so I just pressed "Type" and cycled through with the left and right arrows until I found it. Then I pressed "Start".
 I then had to get all the values I needed from my battery, which were cells, voltage, and amps. The cells and voltage were already right because of the balancing plug. It automatically assumes 3.7 volts per cell, which I guess is standard. This is a picture of the battery, showing how I found everything:
I then had to get all the values I needed from my battery, which were cells, voltage, and amps. The cells and voltage were already right because of the balancing plug. It automatically assumes 3.7 volts per cell, which I guess is standard. This is a picture of the battery, showing how I found everything:
 This is the screen on the charger. 0.4 should be 4.0. I didn't know at the time.
This is the screen on the charger. 0.4 should be 4.0. I didn't know at the time.
 Here's the whole arrangement before I began charging (minus the alligator clips which got cut off). The yellow boxes show where the connections should be. I held down start for three seconds, then pressed it again to confirm to show the charging screen which you see last.
Here's the whole arrangement before I began charging (minus the alligator clips which got cut off). The yellow boxes show where the connections should be. I held down start for three seconds, then pressed it again to confirm to show the charging screen which you see last.


That's all. My next step will probably be messing around with the transmitter and speed controllers, but I'm not sure how to go about any of it yet.
Today I soldered some bullet connectors (which I need to get more of and charged my battery for the first time. I'll explain everything in the order I did them:
Soldering the Bullet Connectors:
This took a pretty long time because I couldn't get the red protector on the bullet connectors. I ended up using electrical tape instead. I'm ordering more bullet connectors so I can use the red covering since I completely destroyed mine.The first thing I did was cut the lengths of wire I needed. I used a wire cutter/stripper, but I think there are other options (although I'm not sure trying to cut with scissors would be a good idea. Since I was only going to use these lengths for charging, I cut them relatively short.










Charging the Battery:
Now to the primary part: charging the battery. To start, I needed to plug in all the cords to connect the battery to the charger. There are two separate spaces for male bullet connectors on the charger; one for positive and one for negative. There are alligator clips that come with the charger that go here. On the right side are several slots with pins. This is to keep track of the separate cells in the battery when balancing. I'm using the one with four pins since it's decided by number of cells + 1 (for ground I think).








That's all. My next step will probably be messing around with the transmitter and speed controllers, but I'm not sure how to go about any of it yet.
Friday, October 14, 2011
Quadcopter Tutorial 3: Messing around with code and the Arduino
EDIT: Someone is helping me out with the quadcopter, and recommended the beta code and configurator (AeroQuad_v2.5_Beta1.zip and AeroQuadConfiguratorFull_v3Beta2.zip in the AeroQuad downloads section). The code is edited the same way as in this documentation, but I'm also changing my style from plus configuration to x configuration.
So I've finally decided to be productive and post another tutorial. This one will be better because it's more of a documentation, not just a tutorial. I'm writing and taking pictures of what I'm doing as I'm doing it and not afterwards. The reason I didn't do that before is because I had already done those before deciding to make a tutorial. Also, the Aeroquad tutorial on their wiki might be easier, so go there if I don't explain it clearly enough or if I'm more boring-er than them.

 By the way, I definitely took that picture, and my desk definitely is that blindingly perfect and white. I just opened the Arduino.exe in the folder I unzipped. AeroQuad recommends that I test the Arduino out with the "blink" code first, so I will. Basically, this just blinks an LED on the Arduino every second.
By the way, I definitely took that picture, and my desk definitely is that blindingly perfect and white. I just opened the Arduino.exe in the folder I unzipped. AeroQuad recommends that I test the Arduino out with the "blink" code first, so I will. Basically, this just blinks an LED on the Arduino every second.
 It opens another window with code on it. It looks like Java, but somewhat simpler. I went to the tools tab, then to board, and chose "Uno", because I have the Arduino Uno. The program can't find my Arduino because it can't find the com port. This told me to go to Control Panel>System and Security>System, so I did. I opened the device manager, found the Uno, and browsed for the driver, which was in the folder arduino-0022>drivers. I chose the folder and the drivers were installed. Now on the device manager, this is what I see:
It opens another window with code on it. It looks like Java, but somewhat simpler. I went to the tools tab, then to board, and chose "Uno", because I have the Arduino Uno. The program can't find my Arduino because it can't find the com port. This told me to go to Control Panel>System and Security>System, so I did. I opened the device manager, found the Uno, and browsed for the driver, which was in the folder arduino-0022>drivers. I chose the folder and the drivers were installed. Now on the device manager, this is what I see:
 I can finally get back to testing. I chose the now-available com port:
I can finally get back to testing. I chose the now-available com port:

 As you can see, uploading now works and I see the LED blinking on for one second, then blinking off for one. Now to the real code.
As you can see, uploading now works and I see the LED blinking on for one second, then blinking off for one. Now to the real code.
 This is extremely simple. Just uncomment whatever you're using (take away the "//"), so I uncommented "#define AeroQuad_v18" since I'm using an Arduino with the AeroQuad 1.9 shield (which is essentially the same as the 1.8).
This is extremely simple. Just uncomment whatever you're using (take away the "//"), so I uncommented "#define AeroQuad_v18" since I'm using an Arduino with the AeroQuad 1.9 shield (which is essentially the same as the 1.8).
 The flight configuration is how the propellers are arranged relative to the front of the quad. The basic ones are X and +. X is meant for fpv quads, or quads with cameras on them so the propellers aren't blocking its view, but it seems more complex for me, and I'm not using a camera, so I chose the + configuration:
The flight configuration is how the propellers are arranged relative to the front of the quad. The basic ones are X and +. X is meant for fpv quads, or quads with cameras on them so the propellers aren't blocking its view, but it seems more complex for me, and I'm not using a camera, so I chose the + configuration:
 There are three optional sensors: the barometer, magnetometer, and battery monitor. I don't have either of the first two, and I'm not using the battery monitor until I'm already finished, so I uncommented only the last choice:
There are three optional sensors: the barometer, magnetometer, and battery monitor. I don't have either of the first two, and I'm not using the battery monitor until I'm already finished, so I uncommented only the last choice:
 The next section has to do with flight angle calculations. Basically, you uncomment the ARG line if you don't have a magnetometer and otherwise leave it. I don't have a magnetometer, so I uncommented it:
The next section has to do with flight angle calculations. Basically, you uncomment the ARG line if you don't have a magnetometer and otherwise leave it. I don't have a magnetometer, so I uncommented it:
 The remainder of the user-definition section is about camera stabilization and stuff that I don't care about (currently), so I'm done!
The remainder of the user-definition section is about camera stabilization and stuff that I don't care about (currently), so I'm done!
I uploaded the code to the Arduino with no problems. If you need any help, comment.
So I've finally decided to be productive and post another tutorial. This one will be better because it's more of a documentation, not just a tutorial. I'm writing and taking pictures of what I'm doing as I'm doing it and not afterwards. The reason I didn't do that before is because I had already done those before deciding to make a tutorial. Also, the Aeroquad tutorial on their wiki might be easier, so go there if I don't explain it clearly enough or if I'm more boring-er than them.
1. Installing the Arduino Software:
First, I'm going to download the software for the Arduino, which can be found here. I chose my operating system, which is Windows. You need to download a zip file. If you don't have a program that can unzip these, I found a good one here. Be careful when installing it and look carefully at every page. Don't let them trick you with sneaky text into installing some crappy useless Bing toolbar. I unzipped the file into a folder called "quadcopter".2. Downloading the AeroQuad Code:
I went here and downloaded the configurator as well as the code and put them in the same folder as the Arduino software. The links should be the two at the bottom: "AeroQuad_v2.4.2.zip" and "AeroQuadConfigurator_v2.7.1.zip". Simply put, the code tells the quadcopter what to do and the configurator troubleshoots if something doesn't work. My folder now looks like this:
3. Testing the Arduino:
To connect the Arduino, I needed the USB A to B cable, which looks like this:



4. Editing and Uploading the Code:
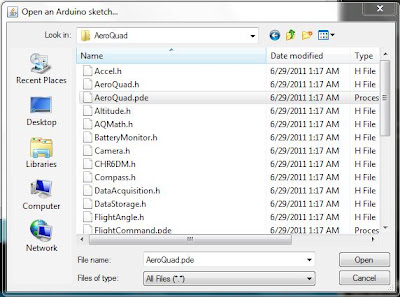
I needed to open the AeroQuad code to start with, so in the Arduino program, I went to File>Open>...>AeroQuad>AeroQuad.pde:




I uploaded the code to the Arduino with no problems. If you need any help, comment.
Saturday, October 1, 2011
[Insert post name here]
So as always when I can't find anything to do, I'm writing here. Actually, I have plenty of things to do. In fact, the total time these things would take could quite possibly be the entire day. I just really don't feel like doing any of them. So, as usual this year, not last, school has been fun, at least compared to usual. I'm half a week to a week ahead in all my classes except Spanish II and Art. I've done all the work I can in Spanish, and I haven't done any of next week's work in Art yet. That's what I need to do, but in order to do that, I need to leave my room, unplug this laptop, take it all the way downstairs, plug it into the printer, print out some stuff, bring the laptop back upstairs, move the things that magically grew while I was gone, and plug my laptop back in. That's probably been the hardest part of my online classes so far. I hate moving my laptop.
I also don't really feel like making another quadcopter tutorial yet because I really don't feel like it right now for some reason. The next tutorial, though will be how to modify the code for the specific quad and how to get that code onto the Arduino.
Finally, the new Humble Bundle is out. This is a collection of indie games for the pc (any OS). It's pay what you want, so you could pay anywhere between a penny and thousands of dollars, and there are people on both ends of that. If you are going to get it, don't pay a penny, because only jerks do that. This Humble Bundle is the Humble Frozen Synapse Bundle. Frozen Synapse is a really awesome strategy game. It's hard to describe how to play, so you'd need to either buy it, or download the demo and try it out, or maybe just watch some videos. Also, if you pay above the average which is about $4.65, you get some indie games from a company called Frozenbyte, all of which look cool. So if you want to get it, go here.
I also don't really feel like making another quadcopter tutorial yet because I really don't feel like it right now for some reason. The next tutorial, though will be how to modify the code for the specific quad and how to get that code onto the Arduino.
Finally, the new Humble Bundle is out. This is a collection of indie games for the pc (any OS). It's pay what you want, so you could pay anywhere between a penny and thousands of dollars, and there are people on both ends of that. If you are going to get it, don't pay a penny, because only jerks do that. This Humble Bundle is the Humble Frozen Synapse Bundle. Frozen Synapse is a really awesome strategy game. It's hard to describe how to play, so you'd need to either buy it, or download the demo and try it out, or maybe just watch some videos. Also, if you pay above the average which is about $4.65, you get some indie games from a company called Frozenbyte, all of which look cool. So if you want to get it, go here.
Monday, September 5, 2011
Quadcopter Tutorial 2: AeroQuad 1.9 Shield
So here's the second tutorial. This will be about how to solder the AeroQuad shield together to make the Arduino more user-friendly. I honestly think it might be easier for you to do the tutorial from the AeroQuad wiki here, but I'll be going through things I had trouble with that they might not completely explain.
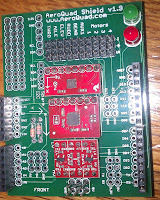
So to start, this is what the shield will end up looking like in the end. I'll number all the sections so you know what part I'm referring to when.


Before I get started with that, though, I'll talk about soldering. First of all, when you solder, solder outside or somewhere with good ventilation. This is because the solder has lead in it, which you shouldn't inhale. Also, because of this, wash your hands after soldering because you don't want lead going into your mouth when you eat. Solder on a surface that either won't get damaged or you don't mind getting damaged if you accidentally touch it with the soldering iron. The soldering iron gets very hot, so you don't want to touch it either. If your soldering iron is like mine, it comes with a little ring which you can set it on when you're waiting for it to cool down or just want to take a break. This is a picture that shows what that's for, because I didn't know at first:

Since you're doing light soldering, the soldering iron should be 15 watts. If you look in the previous picture, you can see that mine can switch between 15 and 30. Your solder should be .032" in diameter. This is the thinner type meant for things like this.

When you solder, you should have a relaxed grip so that the soldering iron doesn't move around too much. Don't hold your hand in the air, because that's unstable and hard to keep still.

This is extremely easy once you get the hang of it. There are two ways I've found I could do this. One is to heat up the metal you will be soldering onto with the soldering iron and just touch the solder to it to melt onto it. Another way is to touch the solder directly to the soldering iron, which is much faster but a little harder. If you look closely in this demonstration, you can see that surface tension causes the solder to gather in a cone shape at the base of wherever you're soldering, so it's very unlikely that you will accidentally connect two pieces of metal that shouldn't be connected.

If, however, you do accidentally solder something you shouldn't have, simply touch the solder with the soldering iron. It should melt again and stick to the soldering iron because of surface tension. Repeat this until it's all gone.
Now,for the actual tutorial:
Thank you for reading this, and I hope it helped.
So to start, this is what the shield will end up looking like in the end. I'll number all the sections so you know what part I'm referring to when.


Before I get started with that, though, I'll talk about soldering. First of all, when you solder, solder outside or somewhere with good ventilation. This is because the solder has lead in it, which you shouldn't inhale. Also, because of this, wash your hands after soldering because you don't want lead going into your mouth when you eat. Solder on a surface that either won't get damaged or you don't mind getting damaged if you accidentally touch it with the soldering iron. The soldering iron gets very hot, so you don't want to touch it either. If your soldering iron is like mine, it comes with a little ring which you can set it on when you're waiting for it to cool down or just want to take a break. This is a picture that shows what that's for, because I didn't know at first:

Since you're doing light soldering, the soldering iron should be 15 watts. If you look in the previous picture, you can see that mine can switch between 15 and 30. Your solder should be .032" in diameter. This is the thinner type meant for things like this.

When you solder, you should have a relaxed grip so that the soldering iron doesn't move around too much. Don't hold your hand in the air, because that's unstable and hard to keep still.

This is extremely easy once you get the hang of it. There are two ways I've found I could do this. One is to heat up the metal you will be soldering onto with the soldering iron and just touch the solder to it to melt onto it. Another way is to touch the solder directly to the soldering iron, which is much faster but a little harder. If you look closely in this demonstration, you can see that surface tension causes the solder to gather in a cone shape at the base of wherever you're soldering, so it's very unlikely that you will accidentally connect two pieces of metal that shouldn't be connected.

If, however, you do accidentally solder something you shouldn't have, simply touch the solder with the soldering iron. It should melt again and stick to the soldering iron because of surface tension. Repeat this until it's all gone.
Now,for the actual tutorial:
1: 8 pin stackable headers:
In the bag of stackable headers you should have, take out the two longest ones. They should each be 8 pins long. Stick them through where you see the number 1 on the first picture so that the black parts are on the top and the pins are sticking through to the other side. Go to the back of the shield and solder them in there using the tips above.2: 6 pin stackable headers:
There should be two more stackable headers that are 6 pins long each. Do the same with those, but on the other side, at the number 2 in the picture at the top.3: Last stackable header:
take the last header. This one is going through the other direction, through the bottom so the black section is on the other side than those of the other headers. I made the mistake of soldering this on last, which makes it really hard as there's not much room once everything else is on. That's why I recommend doing it now.4: Breakout pins:
Take out these things and break out three segments of 10 pins each. While you're at it, for later, break out one more that's 8, another that's 7, and finally, two that are 6. Now, take the three 10 long segments and put them where you see the number 4 in the picture. The black section should be on the top and the shorter side of the pins should be pointing downwards. Solder these in from the other side. Make sure they're completely pressed into place.5: Accelerometer:
The accelerometer is the longest sensor. Take it out as well as the pins you broke out that are 8 long. Put the short side of the pins through the bottom of the accelerometer so the circuitry is facing up. Put the long side of the pins through the top of the shield so that the accelerometer is on top. Look at the first picture at 5 for reference. Solder both the bottom of the shield and the top of the accelerometer. Try to keep it as level as possible so that the readings of the quadcopter aren't thrown off.6: Gyroscope:
The gyroscope is the simpler looking of the last two sensors. Take it and the 7-long pins and do the same as with the accelerometer, taking care to keep it level as you solder it.7: Last Sensor:
This is the sensor that came with the shield. I don't know what it does, just that it's necessary. Take out the two sets of pins that are 6 long each and put them on both sides of the sensor. Solder it as you see in the first picture and you're done for sensors.8: Resistor:
Your shield should have come with two resistors. These are the little light brown things with wires coming from both ends. Take the one with the gold, red, green, and purple stripes. stick it through the two holes you see in the picture directly under the arrow coming from the "x". It doesn't matter which way it's flipped. It works the same either way. I find the easiest way to solder these (as well as the LEDs later on) is to stick the wires through and pull them from the bottom in opposite directions so the wires are pointing outwards and holding the top section in place. Afterwards, solder like normal, and break off the extra wires by either using a cutter or bending them back and forth until the break like a paperclip.9: Resistor 2:
Do the same thing with the second resistor. This one should have gold, orange, green, and brown stripes. Solder it directly under the previous one as in the picture the same way as before.10: Green LED:
This is simple. Take out the green LED, and solder it in the corner where you see the circle with the flat side. Make sure the flat side of the LED and the flat side of the outline match up. Otherwise, the polarity is messed up and the LED won't work. Solder it in the same way you did with the resistors.11: Red LED:
This is the same as the green LED. Just solder it in next to it by the next outline. Once again, be sure to match up the flat sides.Thank you for reading this, and I hope it helped.
Friday, September 2, 2011
Friday
Just wanted to let you know what day it was. Thought I should inform you. So you know what I said about not doing the tutorial because I wanted to do schoolwork? It turns out, it probably would have been more productive to do the tutorial. I got a day's worth of work done in one class after that. I've realized I'm much more productive at school. My personal first day of class was yesterday, and I had gotten a week's worth of work done by first block today. I just have one complaint so far with my classes. My Spanish II teacher has all kinds of questions on her quizzes. True/false, multiple choice, fill in the blank, etc... that's fine. Every teacher does that. I just don't like how the fill in the blank questions are graded by the computer. If you mistype one period or word, you don't get any credit even though you could have gotten the purpose of the question right. This caused me to get a 12/20 or something on one quiz which brought my average down to 90%. That's bad. I'm uncomfortable with anything below 97%.
In my AP Computer Science class, we had an assignment where we had to select a picture chosen by the teacher and describe how to draw it in plain text without saying what it is or what's in it. Afterwards, we had to go to a classmate's instructions and draw what they said. This is what I drew:
 This is what it was supposed to look like:
This is what it was supposed to look like:
 As you can see, mine looks more like two deformed teddy-bears chopped apart with a spike in the middle of a hug. Apparently, that's how you draw a butterfly. So anyway, I thought that was interesting enough to post here. I wrote a "hello world" application for the first time ever in that class too. I've never written my programs like that before. I've always tried to be more original. I wanted to type "System.out.println("something original")" or something, but I've failed in my epic quest to avoid the boring "hello world". So anyway, that's all I have to say. The tutorial will be released when it is. Thank you for reading.
As you can see, mine looks more like two deformed teddy-bears chopped apart with a spike in the middle of a hug. Apparently, that's how you draw a butterfly. So anyway, I thought that was interesting enough to post here. I wrote a "hello world" application for the first time ever in that class too. I've never written my programs like that before. I've always tried to be more original. I wanted to type "System.out.println("something original")" or something, but I've failed in my epic quest to avoid the boring "hello world". So anyway, that's all I have to say. The tutorial will be released when it is. Thank you for reading.
In my AP Computer Science class, we had an assignment where we had to select a picture chosen by the teacher and describe how to draw it in plain text without saying what it is or what's in it. Afterwards, we had to go to a classmate's instructions and draw what they said. This is what I drew:


Wednesday, August 31, 2011
No Tutorial Today
The title says it. This will be short because I have to leave soon. Apparently, although I was never informed of this, you're supposed to celebrate holidays. Just kidding. I knew that, I just expected to have more time on my hands today. I'll probably barely have enough time at this computer to get all my schoolwork done. I'm trying to finish my week's work today. So hopefully, I'll be able to put up the second tutorial on Friday or Saturday, or maybe before since I may have a good amount of free time.
Tuesday, August 30, 2011
Can you hear the echoes?
I can, or more specifically, I will be able to whenever I read this again, which will probably be when I painfully type in this URL to embarrass myself in front of someone who I'll probably barely know, because no doubt whatever I put here will be embarrassing in the future. For example, I'm still extremely embarrassed about the posts I made in 8th grade. It really is true what people say about middle-schoolers thinking they're extremely mature.
So, to an interesting topic. The reason I'm writing this is to say that I'll put up the next quadcopter tutorial tomorrow, because I won't be going to school tomorrow because I don't feel like it. That was a joke. It's actually because I'm celebrating a holiday, Eid, tomorrow.
So meanwhile, before I work on my online classes, I'll tell about the last few days of my life to my future self, who I need to come up with a name for, because "future self" is really getting repetitive. Speaking of repetitiveness, try Googling "recursion". TO THE BATCAVE... or topic... whichever you (but more likely I) prefer. So, today was technically my school's first day of class, although it was basically like every other day so far. We got in to groups like usual and went around stations like usual. The only difference was at the end, we went to all our classes for thirty minutes, which wasn't really enough time to get classwork in after introductions and everything. Monday was far more interesting. We went on a field trip to uptown Charlotte, which is relatively close to the school. We had to go find different landmarks, take pictures, solve riddles, and do other things, so that was fun. I'd never actually been through that much of Charlotte before.
As I think I said before, I'm trying to graduate a year, or maybe even a year and a half early, so I need to get as far ahead in my online classes as possible. I don't know how easy that will be because unlike in online Geometry, all the resources in my current classes aren't available until the time they're supposed to be used. In any case, I have to work on those. Finally, if I didn't mention this before, I got hooked onto this trance artist, Soulero, who is amazing. This is a great track by him, but can't even come close to describing his amazingness. Like all great electronica artists, he's Swedish. So in summary, the next quad tutorial will be tomorrow, I went to school today, and Soulero is awesome.
So, to an interesting topic. The reason I'm writing this is to say that I'll put up the next quadcopter tutorial tomorrow, because I won't be going to school tomorrow because I don't feel like it. That was a joke. It's actually because I'm celebrating a holiday, Eid, tomorrow.
So meanwhile, before I work on my online classes, I'll tell about the last few days of my life to my future self, who I need to come up with a name for, because "future self" is really getting repetitive. Speaking of repetitiveness, try Googling "recursion". TO THE BATCAVE... or topic... whichever you (but more likely I) prefer. So, today was technically my school's first day of class, although it was basically like every other day so far. We got in to groups like usual and went around stations like usual. The only difference was at the end, we went to all our classes for thirty minutes, which wasn't really enough time to get classwork in after introductions and everything. Monday was far more interesting. We went on a field trip to uptown Charlotte, which is relatively close to the school. We had to go find different landmarks, take pictures, solve riddles, and do other things, so that was fun. I'd never actually been through that much of Charlotte before.
As I think I said before, I'm trying to graduate a year, or maybe even a year and a half early, so I need to get as far ahead in my online classes as possible. I don't know how easy that will be because unlike in online Geometry, all the resources in my current classes aren't available until the time they're supposed to be used. In any case, I have to work on those. Finally, if I didn't mention this before, I got hooked onto this trance artist, Soulero, who is amazing. This is a great track by him, but can't even come close to describing his amazingness. Like all great electronica artists, he's Swedish. So in summary, the next quad tutorial will be tomorrow, I went to school today, and Soulero is awesome.
Sunday, August 28, 2011
Quadcopter Tutorial 1: Parts list
EDIT: This "tutorial" is inaccurate compared to my final build. Many of these parts I have not or will not have used, and I will need things other than what I've posted here. After I've finished documenting my build, I will post another parts list, but of only things I needed to use. Also, please don't use this as a full tutorial. I'm not experienced enough to help with everything, but I do mean to help people who have trouble with the beginning concepts as I did.
So, as I said before, I'll be posting the first tutorial today. For all that don't know what a quadcopter is, it's like a remote control helicopter, but while a helicopter has a complex rotor that needs to tilt and move in complex ways, the quad only needs four fixed propellers. I want everyone to know before I start that most of this will be based off the tutorials at AeroQuad. I'll just be focusing a lot more on the simple things that beginners like me don't understand and that the tutorials ignore, as they assume anyone reading them is at least slightly experienced. I'm not. I'm also not doing general tutorials. These are specifically to build exactly what I will be building.
There are several different places to get these parts from, and most if not all of it can be bought online. Every time I buy something else, I'll update this post. So far, I've gotten most of my parts from AeroQuad and HobbyKing, and some things from RadioShack, Ebay, and Home Depot. I'll go in order.
1. Arduino Uno: This is basically the brain of the quad. You upload the code (which is open source thanks to AeroQuad, by the way) and connect the antenna and ESCs. It gets input from the antenna and sensors and tells the four individual speed controllers what to do. The Arduino Uno is one of the simplest ones so it's good for beginners. $29.95
2. AeroQuad Shield 1.9: This is placed on top of the Arduino Uno with all the sensors so people like me don't have to worry about the complex connections they would have to have otherwise. It comes with everything you see, but the shield is slightly modified to fit resistors, which are not shown in the picture (the picture is of the 1.8 shield. $24.95
3. Gyroscope Sensor: This is one of the sensors you will attach to the shield. It senses the tilt of the quad so it can tell whether or not it's level. $49.95
4. Accelerometer Sensor: This is similar to the gyro, but instead of sensing tilt, it senses acceleration, so it can tell which direction the quad moves, and therefore, keep it stable in midair if needed. $29.95
5. Stackable Headers: You solder these to the edges of the shield so you can place it on top of the Arduino. If you have other shields, those can be stacked on top of this as well. $4.95
6. Breakout Pins: These are soldered to the shield for the sensors and plugs for ESCs to connect to. The shield comes with them, but I've forgotten whether I've needed these. Don't feel inclined to buy these. $2.50
7. USB A to B Cable: You probably already have one of these, but if you don't you might as well buy it here. You could also probably get one from Best Buy, Radio Shack, Ebay, or any number of other places. This cable is to connect the Arduino to your computer. $3.95
8. Reciever Cables (6-7x): These are used to connect the separate antenna slots to the shield. You need one for every slot, and I think that's 6, but you may need an extra. I've forgotten. $1.50 each
9. Propellers and Pusher Propellers: You don't have to get these specific propellers, but they must counter-rotate. You will need at least two of each, but from what I've read these break frequently and you will want spares. $3.00 each propeller, $4.00 each pusher propeller
1. Hextronik 24 gram Outrunner Motor (4x): These will be the motors that you put your propellers on. They're very light compared to other options, so the quad should be under a kilo. $8.53 each
2. 10amp ESC (4x): These connect the motors to the Arduino. They are given a number between -1 and 1 I think and based on that number tell the motor they're connected to how fast to go. $9.24 each
3. Battery: If you don't know what this is for, leave... now. $19.99
4. Transmitter: This is basically the remote control. It transmits to the antenna, and the antenna gives information to the Arduino. It's a cheap alternative to the $300 one recommended by AeroQuad. The only difference is that theirs has 9 channels, not 6, so you can use more switches/buttons and stuff, but you don't need more than 6, and theirs has a screen that makes it easier to program the ESCs. With this one, you need to know how to use the joysticks to tell the ESC, which I still have yet to learn. $22.99
5. Bullet Connectors: AeroQuad recommends buying these off Ebay, which I did, but only because I didn't realize that I could have gotten them from HobbyKing, and because of that I need another one. These connect your main power supply to the battery, and you may want another one for charging the battery. This comes with ten, but you only need a couple. $3.58
6. Balancer/Charger: This is to charge, discharge, or balance your battery. Discharging and balancing are used to optimize battery life, especially when you're storing one, but I'm not focused on learning how to use those features just yet. This is basically a computer that charges your battery based on what kind it is and its features (voltage and stuff) $22.99
7. Power Supply: This gives power to the charger, but you may already have one for laptops and other devices. The one needed is 12 volts and 5 amps, so before using one you already have, make sure it's the right kind. $9.99
8. Battery Monitor: Not required. This checks on the juice in the battery, and if it gets below a certain point, it buzzes and blinks. This is only if you're flying it for a long time, but if it's far away, you may not hear or see it. I won't be putting it on until after I'm already done, so there won't be anything about it in these tutorials unless I add one later on. $3.99
1. 18 and 16 Gauge Wire: This is necessary to have for your power distribution system. The 16 gauge will come directly off the battery and the thinner 18 gauge wire will branch off to the separate ESCs and the Arduino to give them all the power they need. You will probably only need a few feet of each. Most experienced people would tell you to get red and black, but I'll only be using one color although I may use electrical tape to color-code the positive and negative wires.
2. 15 and 30 Watt Soldering Irons: These are to solder wires together for your power distribution as well as solder your Arduino's shield together. The lower wattage is for smaller things like the Arduino while the 30 watt would be for things like the power distribution. You can get soldering irons with both settings built in. This is the kind that I have. I got mine from RadioShack.
3. .032" and .062" Rosin Core Solder: If you have a soldering iron, you obviously need solder. The thicker solder is for the power distribution, which is why you need a hotter soldering iron and the thinner is for the shield. I don't know if rosin core solder is required, but AeroQuad said to get that kind and RadioShack had it, so I got it.
4. General Tools: For any project like this, you need tools. You'll need things like wire cutters, wire strippers, allen wrenches, screwdrivers, and maybe a knife.
5. Scale: Since the motors on this quad are light, it needs to be under a certain weight, specifically around a kilo. Because of this you need something to weigh the parts. This can be a 20 dollar scale found at Wal-Mart or Target in the cooking section. Just make sure you are able to weigh in grams because no one uses the English system except for Americans. The metric system is much simpler and widespread. Believe me.
That's all for parts. You may have noticed I didn't mention anything about the frame. That's because I don't know how I'll build the frame yet. That's not important to me until I get everything else straight. I have to go now to get ready for bed and go to school tomorrow. My next tutorial will be something I've already done, soldering together the AeroQuad shield.
So, as I said before, I'll be posting the first tutorial today. For all that don't know what a quadcopter is, it's like a remote control helicopter, but while a helicopter has a complex rotor that needs to tilt and move in complex ways, the quad only needs four fixed propellers. I want everyone to know before I start that most of this will be based off the tutorials at AeroQuad. I'll just be focusing a lot more on the simple things that beginners like me don't understand and that the tutorials ignore, as they assume anyone reading them is at least slightly experienced. I'm not. I'm also not doing general tutorials. These are specifically to build exactly what I will be building.
There are several different places to get these parts from, and most if not all of it can be bought online. Every time I buy something else, I'll update this post. So far, I've gotten most of my parts from AeroQuad and HobbyKing, and some things from RadioShack, Ebay, and Home Depot. I'll go in order.
AeroQuad
The most important thing you get from AeroQuad is the Arduino and its shield. You don't actually have to get the Arduino from there, but it's easier unless you already have one because it ends up being less orders on your part.1. Arduino Uno: This is basically the brain of the quad. You upload the code (which is open source thanks to AeroQuad, by the way) and connect the antenna and ESCs. It gets input from the antenna and sensors and tells the four individual speed controllers what to do. The Arduino Uno is one of the simplest ones so it's good for beginners. $29.95
2. AeroQuad Shield 1.9: This is placed on top of the Arduino Uno with all the sensors so people like me don't have to worry about the complex connections they would have to have otherwise. It comes with everything you see, but the shield is slightly modified to fit resistors, which are not shown in the picture (the picture is of the 1.8 shield. $24.95
3. Gyroscope Sensor: This is one of the sensors you will attach to the shield. It senses the tilt of the quad so it can tell whether or not it's level. $49.95
4. Accelerometer Sensor: This is similar to the gyro, but instead of sensing tilt, it senses acceleration, so it can tell which direction the quad moves, and therefore, keep it stable in midair if needed. $29.95
5. Stackable Headers: You solder these to the edges of the shield so you can place it on top of the Arduino. If you have other shields, those can be stacked on top of this as well. $4.95
6. Breakout Pins: These are soldered to the shield for the sensors and plugs for ESCs to connect to. The shield comes with them, but I've forgotten whether I've needed these. Don't feel inclined to buy these. $2.50
7. USB A to B Cable: You probably already have one of these, but if you don't you might as well buy it here. You could also probably get one from Best Buy, Radio Shack, Ebay, or any number of other places. This cable is to connect the Arduino to your computer. $3.95
8. Reciever Cables (6-7x): These are used to connect the separate antenna slots to the shield. You need one for every slot, and I think that's 6, but you may need an extra. I've forgotten. $1.50 each
9. Propellers and Pusher Propellers: You don't have to get these specific propellers, but they must counter-rotate. You will need at least two of each, but from what I've read these break frequently and you will want spares. $3.00 each propeller, $4.00 each pusher propeller
HobbyKing
Before I start with this section, I want to say that since most of the things you buy from HobbyKing ship from Hong Kong, the shipping will be very expensive, probably around $50.1. Hextronik 24 gram Outrunner Motor (4x): These will be the motors that you put your propellers on. They're very light compared to other options, so the quad should be under a kilo. $8.53 each
2. 10amp ESC (4x): These connect the motors to the Arduino. They are given a number between -1 and 1 I think and based on that number tell the motor they're connected to how fast to go. $9.24 each
3. Battery: If you don't know what this is for, leave... now. $19.99
4. Transmitter: This is basically the remote control. It transmits to the antenna, and the antenna gives information to the Arduino. It's a cheap alternative to the $300 one recommended by AeroQuad. The only difference is that theirs has 9 channels, not 6, so you can use more switches/buttons and stuff, but you don't need more than 6, and theirs has a screen that makes it easier to program the ESCs. With this one, you need to know how to use the joysticks to tell the ESC, which I still have yet to learn. $22.99
5. Bullet Connectors: AeroQuad recommends buying these off Ebay, which I did, but only because I didn't realize that I could have gotten them from HobbyKing, and because of that I need another one. These connect your main power supply to the battery, and you may want another one for charging the battery. This comes with ten, but you only need a couple. $3.58
6. Balancer/Charger: This is to charge, discharge, or balance your battery. Discharging and balancing are used to optimize battery life, especially when you're storing one, but I'm not focused on learning how to use those features just yet. This is basically a computer that charges your battery based on what kind it is and its features (voltage and stuff) $22.99
7. Power Supply: This gives power to the charger, but you may already have one for laptops and other devices. The one needed is 12 volts and 5 amps, so before using one you already have, make sure it's the right kind. $9.99
8. Battery Monitor: Not required. This checks on the juice in the battery, and if it gets below a certain point, it buzzes and blinks. This is only if you're flying it for a long time, but if it's far away, you may not hear or see it. I won't be putting it on until after I'm already done, so there won't be anything about it in these tutorials unless I add one later on. $3.99
General/Locally Found Parts
These are the things that you can't get from HobbyKing or AeroQuad and are probably scattered around the house or easily found at stores like RadioShack and Home Depot.1. 18 and 16 Gauge Wire: This is necessary to have for your power distribution system. The 16 gauge will come directly off the battery and the thinner 18 gauge wire will branch off to the separate ESCs and the Arduino to give them all the power they need. You will probably only need a few feet of each. Most experienced people would tell you to get red and black, but I'll only be using one color although I may use electrical tape to color-code the positive and negative wires.
2. 15 and 30 Watt Soldering Irons: These are to solder wires together for your power distribution as well as solder your Arduino's shield together. The lower wattage is for smaller things like the Arduino while the 30 watt would be for things like the power distribution. You can get soldering irons with both settings built in. This is the kind that I have. I got mine from RadioShack.
3. .032" and .062" Rosin Core Solder: If you have a soldering iron, you obviously need solder. The thicker solder is for the power distribution, which is why you need a hotter soldering iron and the thinner is for the shield. I don't know if rosin core solder is required, but AeroQuad said to get that kind and RadioShack had it, so I got it.
4. General Tools: For any project like this, you need tools. You'll need things like wire cutters, wire strippers, allen wrenches, screwdrivers, and maybe a knife.
5. Scale: Since the motors on this quad are light, it needs to be under a certain weight, specifically around a kilo. Because of this you need something to weigh the parts. This can be a 20 dollar scale found at Wal-Mart or Target in the cooking section. Just make sure you are able to weigh in grams because no one uses the English system except for Americans. The metric system is much simpler and widespread. Believe me.
That's all for parts. You may have noticed I didn't mention anything about the frame. That's because I don't know how I'll build the frame yet. That's not important to me until I get everything else straight. I have to go now to get ready for bed and go to school tomorrow. My next tutorial will be something I've already done, soldering together the AeroQuad shield.
New School
Here's my sporadic update as usual, if "sporadic" can be usual. So, it was recently the 25th of August, which I only know because that's when school starts, and school started. I never remember dates otherwise, except for September 10th because that's when something awesome happens.
So I'm writing right now to tell you how school has been so far. As I think I've said before, I'm not going to that American public school that I went to before. I'm going to a different American public school, but this one is cool. Only 105 or so kids go here, and it's kind of an alternative school. Basically most of the classes are taken through the internet, so you can work ahead. As soon as you finish a class, you begin a new one or you get an internship or something in place of that block. It's meant for both kids who are falling behind in school and need to work more to catch up, but also for kids like me who aren't learning enough in school and want to take extra classes and graduate early. I'm now focused on graduating as a junior. If I'd known about this earlier, I bet I could be graduating this year, but that's on the verge of being unbelievable.
It may seem weird that the classes are online but I still have to go to school, but that's cool because I can't procrastinate like I did when I was homeschooled. Also, if I have questions that aren't clear in the course, instead of going on the discussion forum, I could just raise my hand and ask the teacher, or alternatively, and more likely, just search it on Google like I would anyway. It basically allows me the social environment of normal school, but the ability and encouragement to do much more work. I'm still not sure about the "social environment" part because I have yet to make friends, but I've only been there two days. I'm beginning to make relationships with the staff though, which is cool because the school is relaxed and it's almost like you have a "buddy" relationship with everyone else in the school including the teachers and principal.
You may be wondering about the quadcopter tutorials I mentioned before, but you probably aren't, because you're probably me and already know of everything I've already done and thought and what I will do and will be thinking until right now, if that makes sense, which it does because you're me and this makes sense to me. Anyway, the first tutorial, on parts to buy for the quadcopter, will probably be put up today. If not, probably not until next week, and if not then, a couple months, as usual. I have to go now because I need to do stuff and an awesome Basshunter song just started playing too.
So I'm writing right now to tell you how school has been so far. As I think I've said before, I'm not going to that American public school that I went to before. I'm going to a different American public school, but this one is cool. Only 105 or so kids go here, and it's kind of an alternative school. Basically most of the classes are taken through the internet, so you can work ahead. As soon as you finish a class, you begin a new one or you get an internship or something in place of that block. It's meant for both kids who are falling behind in school and need to work more to catch up, but also for kids like me who aren't learning enough in school and want to take extra classes and graduate early. I'm now focused on graduating as a junior. If I'd known about this earlier, I bet I could be graduating this year, but that's on the verge of being unbelievable.
It may seem weird that the classes are online but I still have to go to school, but that's cool because I can't procrastinate like I did when I was homeschooled. Also, if I have questions that aren't clear in the course, instead of going on the discussion forum, I could just raise my hand and ask the teacher, or alternatively, and more likely, just search it on Google like I would anyway. It basically allows me the social environment of normal school, but the ability and encouragement to do much more work. I'm still not sure about the "social environment" part because I have yet to make friends, but I've only been there two days. I'm beginning to make relationships with the staff though, which is cool because the school is relaxed and it's almost like you have a "buddy" relationship with everyone else in the school including the teachers and principal.
You may be wondering about the quadcopter tutorials I mentioned before, but you probably aren't, because you're probably me and already know of everything I've already done and thought and what I will do and will be thinking until right now, if that makes sense, which it does because you're me and this makes sense to me. Anyway, the first tutorial, on parts to buy for the quadcopter, will probably be put up today. If not, probably not until next week, and if not then, a couple months, as usual. I have to go now because I need to do stuff and an awesome Basshunter song just started playing too.
Saturday, August 20, 2011
Tutorials
So, although no one reads this, I'm back, because, once again, talking to yourself really is fun. The reason is because of the quadcopter I'm building. I've showed everything I've done so far, but that doesn't really show how to do it. Therefore, I will be reposting the things I've done in a more "tutorialish" way. I will hopefully continue until the end of the build and I hope anyone interested will read them.
Keep in mind that these tutorials will be for complete beginners, and not people who have already done big projects like these. This is because I was a complete beginner (on most things) and others will probably encounter similar problems, like, for example, how to attach a propeller to a smaller motor, which is kind of strange. So, that's all I have to say, and I hope I don't keep posting months apart like I have been.
Keep in mind that these tutorials will be for complete beginners, and not people who have already done big projects like these. This is because I was a complete beginner (on most things) and others will probably encounter similar problems, like, for example, how to attach a propeller to a smaller motor, which is kind of strange. So, that's all I have to say, and I hope I don't keep posting months apart like I have been.
Friday, July 22, 2011
HobbyKing... and more!
It's been weeks and weeks and weeks... and I haven't posted one thing. Of course it doesn't really matter since the person reading this probably got here automagically by being bored. So anyway, I was on a road trip with my family that was very exciting and not boring like you (sorry, I'm just imagining someone who has nothing better to do than read a blog by someone who barely has a clue about anything, including blogging). So the HobbyKing stuff for my quadcopter arrived shortly before we left. I also got some stuff from Home Depot for wiring the quadcopter. I will now go over it all:
 This... is the battery (dun dun DUUUUUUUUUUUUN). It gives electricity to the quadcopter so it can fly. That's what a battery is supposed to do. Batteries provide electricity. You learn something everyday, right? So this is supposed to be for the quadcopter, but it's 300 grams. I need my quad to be under 800, so it's rather heavy. However, I'm going to try it out anyway and hope it works.
This... is the battery (dun dun DUUUUUUUUUUUUN). It gives electricity to the quadcopter so it can fly. That's what a battery is supposed to do. Batteries provide electricity. You learn something everyday, right? So this is supposed to be for the quadcopter, but it's 300 grams. I need my quad to be under 800, so it's rather heavy. However, I'm going to try it out anyway and hope it works.
 This is the transmitter. It is basically a huge remote control that you program. It's made for airplanes, but I. Don't. Have. To. OBEY. To the left of the transmitter is the wire that connects it to the computer for programming. On the right is a glorified lanyard for hooking to the transmitter because it's really, really big. The bottom right is the thing it transmits to, which I'll be connecting to the Arduino, so it can do all the work and I don't have to. I don't know what the thing on the bottom left is, so if anyone who's actually bored enough to read this far knows, please tell me. It's the same connection that fits into the antenna, but the wire just loops around.
This is the transmitter. It is basically a huge remote control that you program. It's made for airplanes, but I. Don't. Have. To. OBEY. To the left of the transmitter is the wire that connects it to the computer for programming. On the right is a glorified lanyard for hooking to the transmitter because it's really, really big. The bottom right is the thing it transmits to, which I'll be connecting to the Arduino, so it can do all the work and I don't have to. I don't know what the thing on the bottom left is, so if anyone who's actually bored enough to read this far knows, please tell me. It's the same connection that fits into the antenna, but the wire just loops around.
 What you see here is the charger. It charges the battery. The battery because it's not like the battery can magically create electricity... the wall does... duh. Above it is what connects the charger to the wall. It balances and charges the cells of the battery. the only problem is you need to program it to the voltage, amperage, cell number, and a bunch of other stuff of the battery, because god forbid if it could do that itself. I can't really tell it anymore than how many cells there are. Beside it are different connectors for different batteries I don't have. LiPos connect to the side of the charger.
What you see here is the charger. It charges the battery. The battery because it's not like the battery can magically create electricity... the wall does... duh. Above it is what connects the charger to the wall. It balances and charges the cells of the battery. the only problem is you need to program it to the voltage, amperage, cell number, and a bunch of other stuff of the battery, because god forbid if it could do that itself. I can't really tell it anymore than how many cells there are. Beside it are different connectors for different batteries I don't have. LiPos connect to the side of the charger.
 These are the four motors. Now, I know what you're thinking: This guy is stupid! There's only one motor! Well, if you look closely, there are four boxes hidden in the background. They might be hard for a person with an IQ lower than OVER 9000 to see, but they contain three more motors. One is already opened and empty. The motors come with an O-ring and a propeller saver, and I didn't know how they worked until recently because a hero from AeroQuad told me. they attach like this:
These are the four motors. Now, I know what you're thinking: This guy is stupid! There's only one motor! Well, if you look closely, there are four boxes hidden in the background. They might be hard for a person with an IQ lower than OVER 9000 to see, but they contain three more motors. One is already opened and empty. The motors come with an O-ring and a propeller saver, and I didn't know how they worked until recently because a hero from AeroQuad told me. they attach like this:

 This is the battery alarm, but who wouldn't know that? It buzzes and blinks when the battery is low, but I've heard it's hard to see or hear. I won't be using it until I'm done building and testing the quadcopter so I'm in no rush to unpackage it or anything. Plus, I have to change the code if I want to do that and I don't know enough about any of this to attempt that.
This is the battery alarm, but who wouldn't know that? It buzzes and blinks when the battery is low, but I've heard it's hard to see or hear. I won't be using it until I'm done building and testing the quadcopter so I'm in no rush to unpackage it or anything. Plus, I have to change the code if I want to do that and I don't know enough about any of this to attempt that.
 The last things that came from HobbyKing were the ESCs, or electronic speed controllers. They CONTROL the SPEED of the motors. That's why they're called SPEED CONTROLLERS. Get it? It's probably too complex, but don't worry. You seem quite intelligent. The only problem with these is that I have to program them with a series of complex movements from the joysticks of the transmitter, which I'm not ready to do until some other time when more likely than not, I'll say this exact sentence again.
The last things that came from HobbyKing were the ESCs, or electronic speed controllers. They CONTROL the SPEED of the motors. That's why they're called SPEED CONTROLLERS. Get it? It's probably too complex, but don't worry. You seem quite intelligent. The only problem with these is that I have to program them with a series of complex movements from the joysticks of the transmitter, which I'm not ready to do until some other time when more likely than not, I'll say this exact sentence again.
 This is the invoice from HobbyKing. Just so you know, all those prices are diluted down to 30% because, from what I have read, it helps the package get through customs more quickly.
This is the invoice from HobbyKing. Just so you know, all those prices are diluted down to 30% because, from what I have read, it helps the package get through customs more quickly.
I also got some things from Home Depot with my dad because I need wiring for the power supply and stuff:
 This is the 16 gauge wire I need that comes directly from the battery and branches off eventually into the 18 gauge wire here:
This is the 16 gauge wire I need that comes directly from the battery and branches off eventually into the 18 gauge wire here:
 This branches off the 16 gauge wire and goes to each ESC and the Arduino to provide power to all of them.
This branches off the 16 gauge wire and goes to each ESC and the Arduino to provide power to all of them.
 This is a wire cutter that my dad got because I guess I need it to cut and strip wires. That's all for now.
This is a wire cutter that my dad got because I guess I need it to cut and strip wires. That's all for now.
 These are some connectors that will hopefully connect the wires to my battery. I don't think they will, because we just bought what Home Depot had and not what we were supposed to, but they may work.
These are some connectors that will hopefully connect the wires to my battery. I don't think they will, because we just bought what Home Depot had and not what we were supposed to, but they may work.
 This is the receipt from Home Depot. I think they skipped an item, but oh well. I have nothing interesting to say.
This is the receipt from Home Depot. I think they skipped an item, but oh well. I have nothing interesting to say.
I have gotten a few things done in the long time I've had. For one, I uploaded the code to the Arduino, and that took like five minutes. I also put together the AeroQuad shield, which goes on top of the Arduino and everything connects to. I have a picture of it here:
 This is the very useful soldering iron I used for the shield and will be using for the power supply and battery alarm monitor buzzer thing. It has two heats so I can solder small or large things, and it's helped a lot, even though I've only gotten one thing done with it.
This is the very useful soldering iron I used for the shield and will be using for the power supply and battery alarm monitor buzzer thing. It has two heats so I can solder small or large things, and it's helped a lot, even though I've only gotten one thing done with it.
So that's everything. It's now 11:25 and I need to go to sleep because I want to wake up early and do something interesting like relearn how to backflip or try a wallspin. I should start putting tutorials up here on how to do stuff. That would be cool. Of course, only I would read them because this blog is like a ghost town. If I stay in front of this text for much longer, I will get a "very minor case of serious brain damage" to quote Wheatley from Portal 2, the best game ever, which I think everyone should be required to play and every school required to teach. I might make a whole post dedicated to Portal and Valve. So, I'm leaving, and you're probably me.







I also got some things from Home Depot with my dad because I need wiring for the power supply and stuff:





I have gotten a few things done in the long time I've had. For one, I uploaded the code to the Arduino, and that took like five minutes. I also put together the AeroQuad shield, which goes on top of the Arduino and everything connects to. I have a picture of it here:


So that's everything. It's now 11:25 and I need to go to sleep because I want to wake up early and do something interesting like relearn how to backflip or try a wallspin. I should start putting tutorials up here on how to do stuff. That would be cool. Of course, only I would read them because this blog is like a ghost town. If I stay in front of this text for much longer, I will get a "very minor case of serious brain damage" to quote Wheatley from Portal 2, the best game ever, which I think everyone should be required to play and every school required to teach. I might make a whole post dedicated to Portal and Valve. So, I'm leaving, and you're probably me.
Subscribe to:
Posts (Atom)